AWS Architecture Blog
Category: Automotive

How Stellantis streamlines floating license management with serverless orchestration on AWS
In this post, we explore a unique scenario where an ISV, unable to provide a floating license option for cloud usage, worked with Stellantis to develop an alternative solution. This approach, implemented with the ISV’s permission, treats named user licenses as if they were floating, automatically assigning and removing them based on the state of user workbench instances.

Software-defined edge architecture for connected vehicles
To remain competitive in a marketplace that increasingly views transportation as a service emphasizing customer experience, vehicle capabilities and mobility applications need to improve and increase value over time, much like the internet of things and smart phones have done. Vehicle manufacturers and fleet operators are responding to this change by using data to inform […]

How to Run Massively Scalable ADAS Simulation Workloads on CAEdge
This post was co-written by Hendrik Schoeneberg, Sr. Global Big Data Architect, The An Binh Nguyen, Product Owner for Cloud Simulation at Continental, Autonomous Mobility – Engineering Platform, Rumeshkrishnan Mohan, Global Big Data Architect, and Junjie Tang, Principal Consultant at AWS Professional Services. AV/ADAS simulations processing large-scale field sensor data such as radar, lidar, and […]

Developing a Platform for Software-defined Vehicles with Continental Automotive Edge (CAEdge)
This post was co-written by Martin Stamm, Principal Expert SW Architecture at Continental Automotive, Andreas Falkenberg, Senior Consultant at AWS Professional Services, Daniel Krumpholz, Engagement Manager at AWS Professional Services, David Crescence, Sr. Engagement Manager at AWS, and Junjie Tang, Principal Consultant at AWS Professional Services. Automakers are embarking on a digital transformation journey to […]
Ingesting Automotive Sensor Data using DXC RoboticDrive Ingestor on AWS
This post was co-written by Pawel Kowalski, a Technical Product Manager for DXC RoboticDrive and Dr. Max Böhm, a software and systems architect and DXC Distinguished Engineer. To build the first fully autonomous vehicle, L5 standard per SAE, auto-manufacturers collected sensor data from test vehicle fleets across the globe in their testing facilities and driving […]
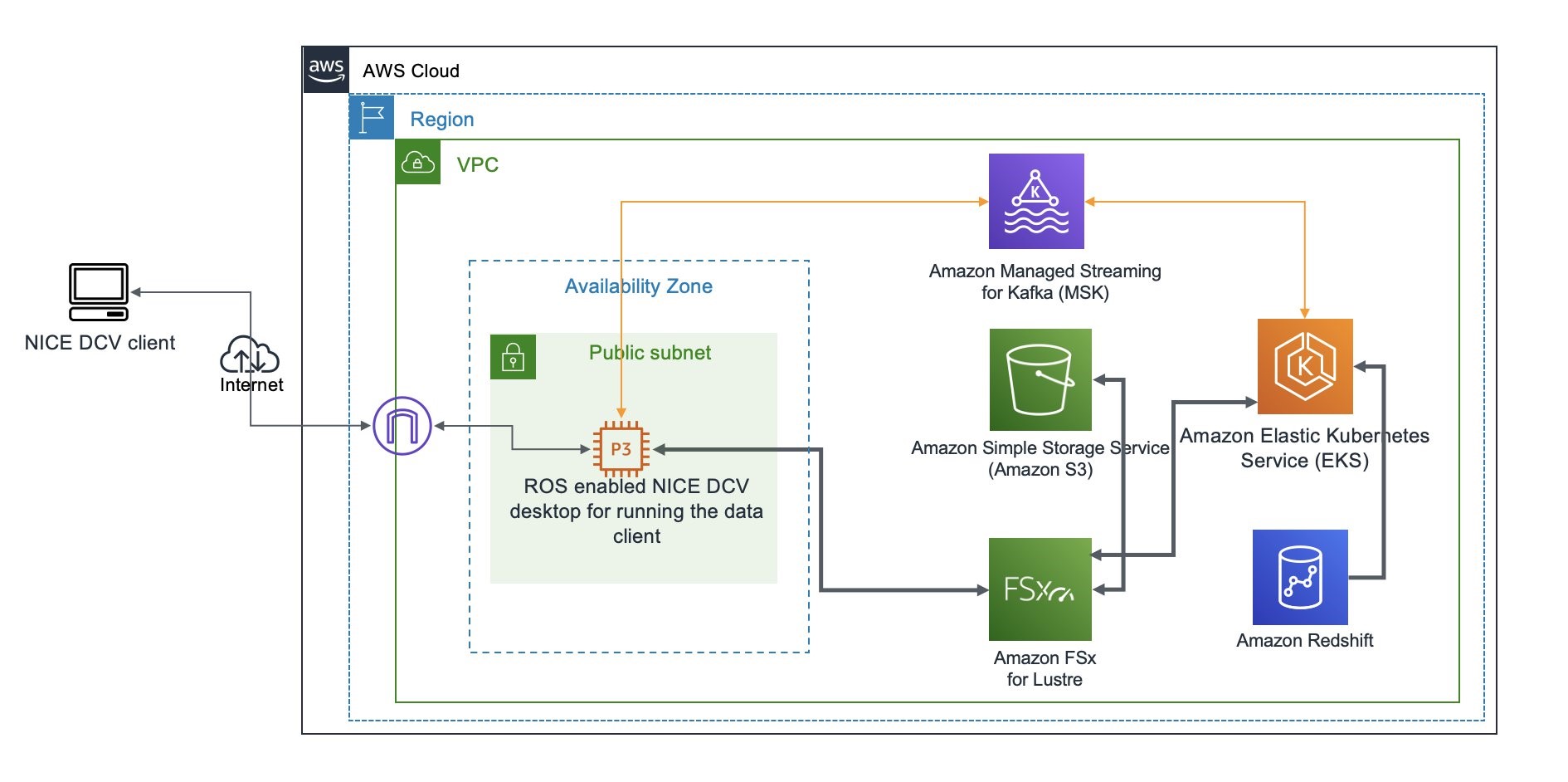
Field Notes: Building a Data Service for Autonomous Driving Systems Development using Amazon EKS
Many aspects of autonomous driving (AD) system development are based on data that capture real-life driving scenarios. Therefore, research and development professionals working on AD systems need to handle an ever-changing array of interesting datasets composed from the real-life driving data. In this blog post, we address a key problem in AD system development, which […]
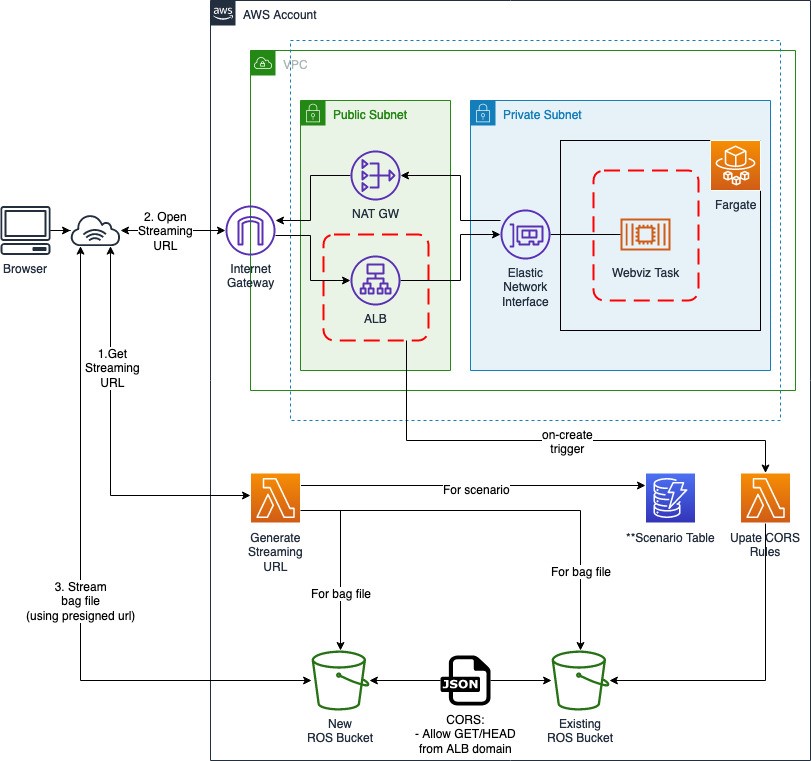
Field Notes: Deploy and Visualize ROS Bag Data on AWS using rviz and Webviz for Autonomous Driving
In the automotive industry, ROS bag files are frequently used to capture drive data from test vehicles configured with cameras, LIDAR, GPS, and other input devices. The data for each device is stored as a topic in the ROS bag file. Developers and engineers need to visualize and inspect the contents of ROS bag files to identify […]

Field Notes: Building an automated scene detection pipeline for Autonomous Driving – ADAS Workflow
This Field Notes blog post in 2020 explains how to build an Autonomous Driving Data Lake using this Reference Architecture. Many organizations face the challenge of ingesting, transforming, labeling, and cataloging massive amounts of data to develop automated driving systems. In this re:Invent session, we explored an architecture to solve this problem using Amazon EMR, Amazon […]
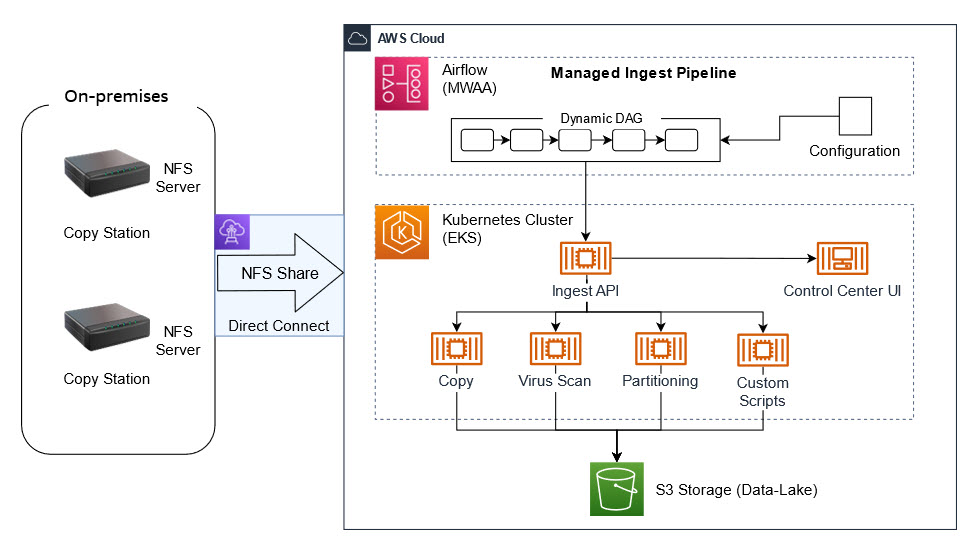
Field Notes: Deploying Autonomous Driving and ADAS Workloads at Scale with Amazon Managed Workflows for Apache Airflow
Cloud Architects developing autonomous driving and ADAS workflows are challenged by loosely distributed process steps along the tool chain in hybrid environments. This is accelerated by the need to create a holistic view of all running pipelines and jobs. Common challenges include: finding and getting access to the data sources specific to your use case, […]

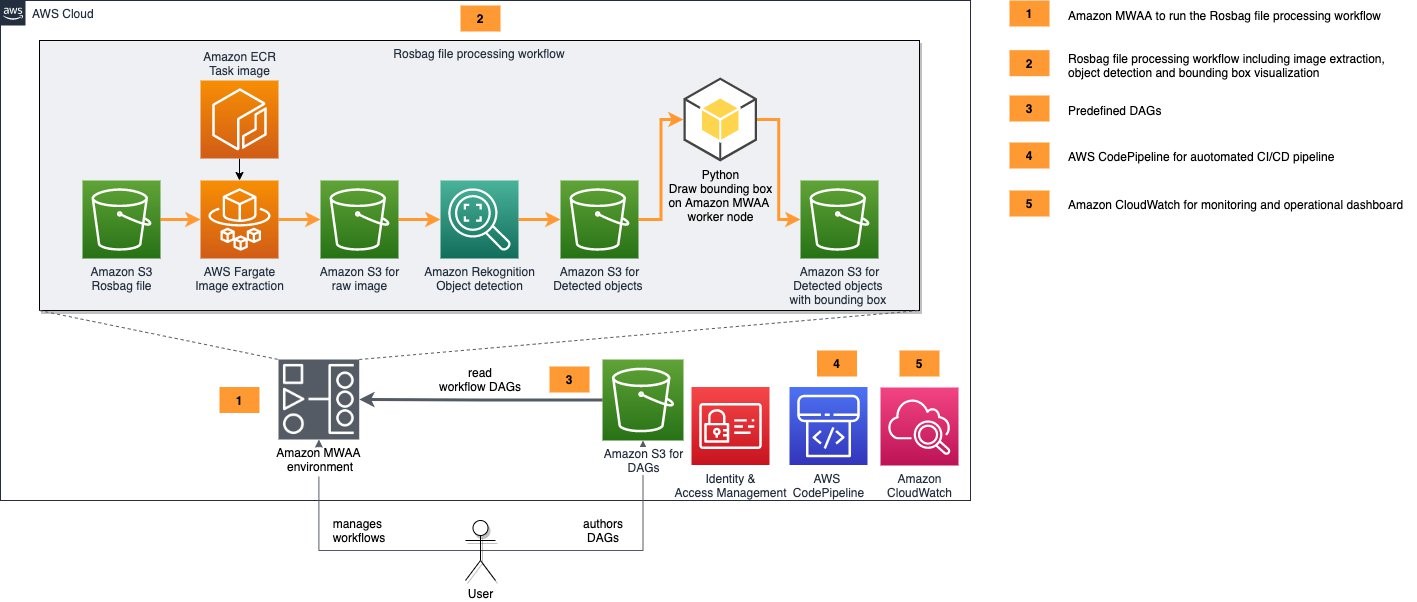
Field Notes: Building an Automated Image Processing and Model Training Pipeline for Autonomous Driving
In this blog post, we demonstrate how to build an automated and scalable data pipeline for autonomous driving. This solution was built with the goal of accelerating the process of analyzing recorded footage and training a model to improve the experience of autonomous driving. We will demonstrate the extraction of images from ROS bag file […]